


動動聊天室 | 沒有GPS的水下世界,海洋機(jī)器人如何“不迷路”?
本期嘉賓:
陳質(zhì)二,中國科學(xué)院沈陽自動化研究所 研究員
研究方向:新概念海洋機(jī)器人技術(shù)與系統(tǒng)
動動:陳老師,我想知道,機(jī)器人在海里面是怎么做到不迷路呢?像我們一樣利用手機(jī)上的導(dǎo)航程序一樣,它也有自己的導(dǎo)航工具嗎?
陳質(zhì)二:我們用手機(jī)GPS導(dǎo)航,依賴的是電磁波,但是,電磁波在水中會發(fā)生非常劇烈的衰減,入水不過2米,能量就會消耗殆盡。所以,怎么讓機(jī)器人在水中也能“找準(zhǔn)路”、“找對路”,是科學(xué)家們需要解決的難題。
動動:既然GPS信號在水中無法發(fā)揮作用,那海洋機(jī)器人如何知道自己的位置?
陳質(zhì)二:像我們剛才說的那樣,水下確實(shí)是個“電磁信號荒漠”,但海洋機(jī)器人有自己的一套“特殊導(dǎo)航法”。比如它們會用聲學(xué)定位,相當(dāng)于“水下GPS”,我們通常會在海底或者水面平臺上放幾個聲學(xué)信標(biāo)當(dāng)標(biāo)記點(diǎn),通過聲波在海洋機(jī)器人和信標(biāo)之間傳輸?shù)臅r間,來計算機(jī)器人和信標(biāo)之間的距離,三個信標(biāo)相互配合,就能幫助海洋機(jī)器人在水下實(shí)現(xiàn)三角定位。
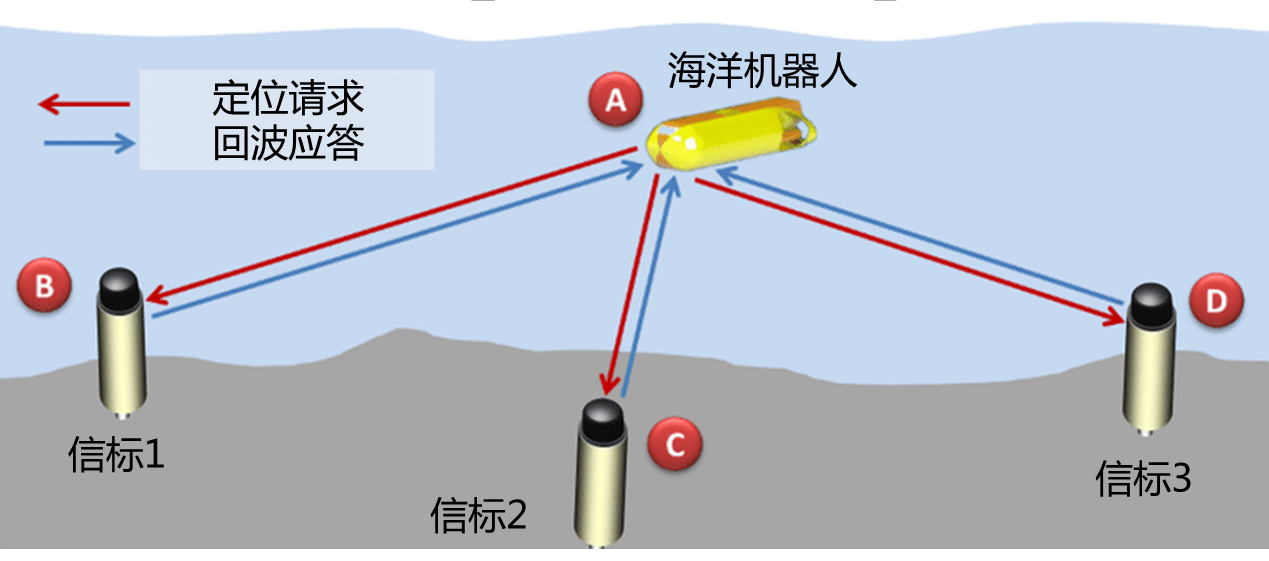
聲學(xué)信標(biāo)定位示意圖(以海底長基線定位為例)
動動:那如果附近沒有聲學(xué)信標(biāo),海洋機(jī)器人無法“聽見”該怎么辦?總不能“隨波逐流”吧?
陳質(zhì)二:這時候就得靠“航位推算”或者“慣性導(dǎo)航”了。“航位推算”是海洋機(jī)器人通過一種裝置向海底發(fā)射聲波,利用回聲頻率的變化計算出機(jī)器人相對于海底的速度,再結(jié)合羅經(jīng)儀和羅盤的航向信息推算位置。“慣性導(dǎo)航”則是相當(dāng)于給海洋機(jī)器人裝了一個“運(yùn)動傳感器”,實(shí)時測量它的運(yùn)動數(shù)據(jù),然后把這些數(shù)據(jù)累加起來,就能確定它當(dāng)前的位置。
動動:陳老師我還有個疑問,在黑乎乎的水下,機(jī)器人就算能辨別方向,那它怎么“看路”呢?
陳質(zhì)二:在淺海或清水區(qū),海洋機(jī)器人常常是結(jié)合圖像處理和SLAM(同步定位與建圖)算法,將實(shí)時畫面和預(yù)存地圖進(jìn)行對比,來識別珊瑚、巖石等地標(biāo),有點(diǎn)像在海底玩“大家來找茬”。但如果水太渾,就改用聲吶成像,把海底掃描成抽象派線稿,再與已知地形定位匹配。雖然畫面抽象得像畢加索的畫,但只要能認(rèn)出個海溝或沙坡,就能瞬間鎖定位置。
動動:這么多方法混著用,海洋機(jī)器人不會“腦子打架”嗎?
陳質(zhì)二:恰恰相反,它們可是“端水大師”!當(dāng)前主流的導(dǎo)航方法都是“組合型”導(dǎo)航——“航位推算”負(fù)責(zé)實(shí)時測速,“慣性導(dǎo)航”負(fù)責(zé)慣性糾偏,“聲信標(biāo)”負(fù)責(zé)絕對位置校準(zhǔn),GPS趁上浮時偷偷補(bǔ)個定位。
動動:未來海洋機(jī)器人導(dǎo)航會更厲害嗎?有沒有科幻片里的黑科技?
陳質(zhì)二:當(dāng)然!科學(xué)家們正在搗鼓些狠活。比如地球物理場(地磁、重力)導(dǎo)航。未來,AI技術(shù)的發(fā)展強(qiáng)大還可以賦予海洋機(jī)器人像魚一樣的導(dǎo)航本領(lǐng),在復(fù)雜水域精準(zhǔn)走位。還有量子慣性導(dǎo)航,據(jù)說能把導(dǎo)航精度提升好幾個數(shù)量級。不過這些“開掛”神技,還需要科學(xué)家們持續(xù)不斷地探索與攻克!
動動:哇!太厲害了,有了這些神技的加持,海洋機(jī)器人一定能實(shí)現(xiàn)更多的功能,更好地服務(wù)于人類。
陳質(zhì)二:讓我們共同努力吧!
附件下載:




