


動動聊天室?|?如何讓機器人的“反射弧”變“短”
本期嘉賓:
許馳,中國科學院沈陽自動化研究所 機器人與智能系統全國重點實驗室 研究員
研究方向:工業控制系統、工業無線網絡,網絡人工智能
動動:許老師,最近人形機器人越來越受到大家關注,我很好奇它們是怎么做到像人一樣有能聽、能看、能感受到東西的呢?
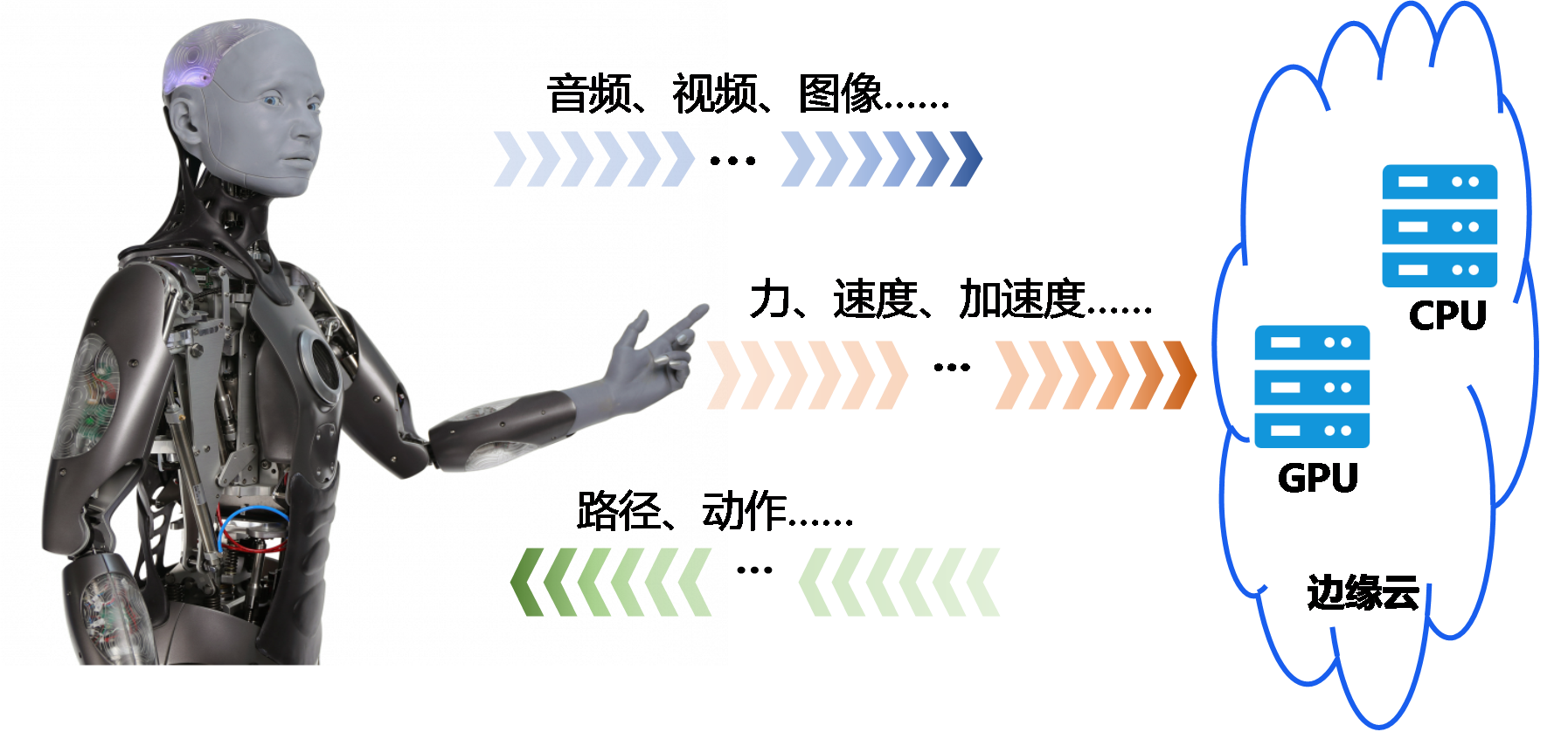
許馳:人形機器人是機器人一種形態,是靠“傳感器”來感知世界的。通過不同類型的傳感器進行采樣,并在端、邊和云進行數據的協同處理才做到可聽、可看、可感。
動動:許老師能展開介紹下這些感知是如何實現的嗎?
許馳:具體來說,視聽覺感知是通過采集高清音視頻數據,并在云或邊緣云進行實時計算,實現認知決策,進而支撐機器人自主運行。而觸覺感知則通過壓電、光學、圖像等不同類型的觸覺傳感器進行采樣,通過高強度的計算建模來讓機器人感受周圍環境。這些視觸聽數據需要在云邊端進行動態流轉,不僅要進行基礎的信號采樣,更重要的是完成大量感知數據的實時通信和計算。
動動:看來機器人的感知并不是單純的“感知”,還得做通信和計算,比想象的要復雜的多。
許馳:對呀,尤其是人形機器人要想靈巧,就必須要減輕負載,不能背著笨重的計算設備到處跑,這就要求我們需要把算力需求大、實時性要求高的感知任務動態遷移到云或邊緣云進行計算,以此來減輕機器人負載、降低能耗。
動動:我之前了解到人類的觸覺是靠神經傳導,具有毫秒級的閉環反饋要求,這對機器人來說是不是很難?
許馳:動動你知道得可真多!確實是這樣,機器人的觸覺感知,在理論上也應該達到毫秒級的反饋時延,但這是一個非常具有挑戰性的難題。主要原因在于,機器人由大量不同類型的傳感器、處理器、控制器和執行器組成,經過感知、通信、計算、控制、決策、執行等閉環反饋過程。其中,采樣、排隊、傳輸、計算等過程均會產生時延,每個階段都是毫秒級甚至分鐘級的,這樣“掐指一算”就遠超毫秒級時延了。就好比我們說一個人的“反射弧”有點長。
動動:這可太難了,什么樣的網絡能滿足機器人觸覺感知這么高的要求啊?
許馳:目前,一些預編程的智能機器人是采用有線網絡來實現一定程度的感知。但機器人總不能一直拖著“尾巴”走呀,“提線木偶”不是我們想要的最終形態,尤其是對于人形機器人來說,它們需要進行實時的環境交互,會受到隨機突發干擾等影響,使得我們難以控制無線觸覺感知的反饋時延。
動動:那我們可以怎么樣讓它們的“反射弧”變“短”?
許馳:我們可以借助無線通信。經過科學家們的不懈努力,無線技術不斷向前發展,但是距離滿足像人形機器人觸感那么高的要求,還有很長的路要走。也正因如此,我們基于前期在工業無線網絡研究方面積累的成果,正在積極開展關于機器人觸感網的研究工作,希望能夠不斷提升機器人的觸感能力。
動動:哇!無線網絡與機器人的融合,可真是令人期待!
許馳:我們會繼續努力,讓機器人的感知能力更加強大!
附件下載:




